Pi 系列 04|Tool 系统(上):一个 toolCall 的一生
前三篇可以先看
Pi 系列 01|用最小例子看 agent runtime 的事件流
这篇介绍下 tool 相关的。
写在前面
这一篇(上)先回答一个问题:当模型”调用”一个工具时,从它生成调用意图,到本地真的执行,再到结果回到下一轮上下文,中间发生了什么? 我们顺着这条执行链走一遍,重点看 pi 怎么处理出错。
说明:正文只用函数名定位代码(如
prepareToolCall),不写具体行号——行号会随版本变化,函数名更稳定,也方便你自己 grep 查找。
Tool 是什么:模型够不到的那部分
先看一个现象。在一个基于 pi 的界面里问”今天天气怎么样”,模型可能这样回答:
“我这边不能实时查询天气数据。你可以看手机天气 App 或搜索”北京天气”获取最新情况。”
如下图:
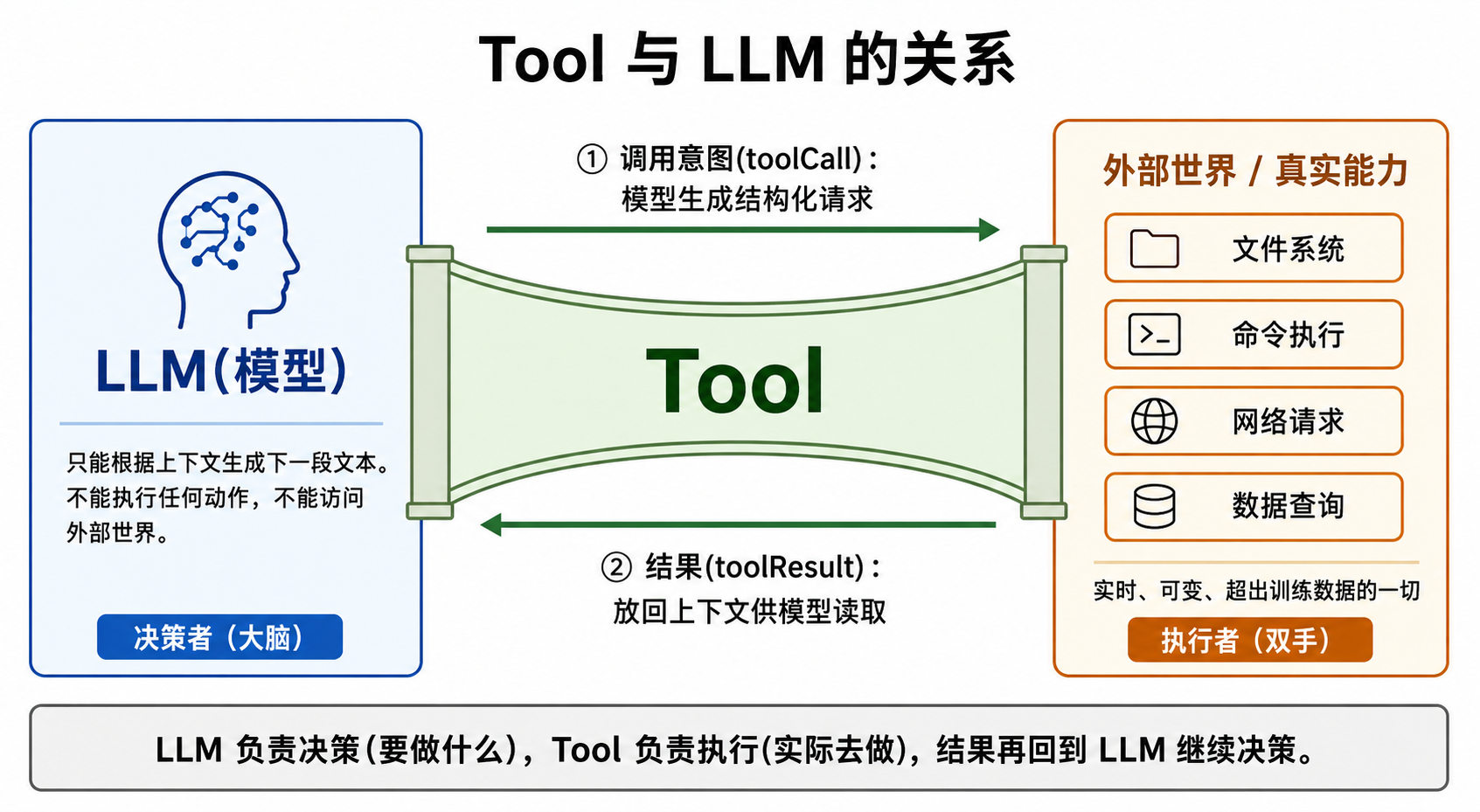
模型为什么查不了?因为它本身只能做一件事:根据上下文生成下一段文本。它读不了文件、跑不了命令、访问不了实时数据。天气是实时的、训练数据里没有的,模型够不到,只能让你自己去查。
这正是 tool 要解决的问题。给模型挂一个查天气的工具后,同样的问题会变成:模型生成一个”调用查天气工具”的请求 → 程序替它真的查了天气接口 → 结果放回上下文 → 模型读到结果再回答你。
一句话:tool 是模型和外部世界之间的桥。 模型负责决策(要做什么),tool 负责执行(实际去做),结果再回到模型继续决策。
理解了 tool 是什么,下一个问题自然就来了:模型”调用”工具时,到底是谁在执行?
先想清楚一件事:模型并不执行工具
当模型”调用” bash 工具跑 ls 时,下面哪个更接近真相?
- A. 模型自己执行了
ls,拿到结果,继续往下说。 - B. 模型只是生成了一段文本(“我想用 bash 跑 ls”),程序看到这段文本,替它跑了
ls,再把结果放回上下文给它读。
答案是 B。
模型只能生成文本,它甚至不能”调用”工具——它只能生成一段 表示”我想调用工具”的结构化文本。真正执行的是 harness。
这个区分是整个 tool 系统的前提:因为模型只生成意图、不执行,所以 harness 必须补上”识别意图 → 代为执行 → 把结果放回去”这一整套机制。下面的代码都围绕这件事展开。
在源码里,”意图”和”执行”是分开的两步
回到 02 篇看过的主循环 runLoop(agent-loop.ts)。把和工具相关的几行单独拎出来:
1
2
3
4
5
6
7
8
9
// 模型这一步只负责生成。到这里为止,ls 还没有执行
const message = await streamAssistantResponse(...)
// 程序从模型的回复里识别是否存在工具调用意图
const toolCalls = message.content.filter((c) => c.type === "toolCall");
// 找到了意图,程序代模型执行
if (toolCalls.length > 0) {
const executedToolBatch = await executeToolCalls(currentContext, message, config, signal, emit);
把这三步对应回前面的 B:
| 步骤 | 谁在动 | 做什么 |
|---|---|---|
| 生成 | 模型 | 生成回复(可能含”我想调 bash ls”的意图) |
| 识别 | 程序 | 从回复里 filter 出 toolCall |
| 执行 | 程序 | executeToolCalls 真正执行 |
关键证据是:生成(streamAssistantResponse)和执行(executeToolCalls)是两个不同的函数调用,中间隔着一行 filter。如果是 A(模型自己执行),这里不需要 filter,也不需要独立的 executeToolCalls。正因为是 B,pi 才需要这套”生成 → 识别 → 代为执行 → 放回去”流程。
补充一个边界条件:如果模型生成的回复里没有 toolCall(纯文本回答),也就是 if (toolCalls.length > 0) 不会进入,这一轮就是纯文本回复,不执行任何工具。
结果去哪了:谁拥有状态,谁负责写
执行完,结果要回到上下文。看 runLoop 紧接着的几行:
1
2
3
4
5
6
toolResults.push(...executedToolBatch.messages); // 收集执行结果
...
for (const result of toolResults) {
currentContext.messages.push(result); // 放进"这次要发给模型的上下文"
newMessages.push(result); // 放进"这次 run 新产生的消息(归档)"
}
currentContext.messages.push(result) 就是”把结果放回去”——下一轮模型调用(又一次 streamAssistantResponse)时,这条结果已经在上下文里,模型就能读到 ls 的输出。闭环成立:
1
生成意图 → 识别 → 执行 → 放回上下文 → 下一轮模型读到结果
这里有个容易被忽略、但很关键的设计:为什么”放回上下文”是 runLoop 在做,而不是 executeToolCalls 内部直接做?
沿着代码看三步就能说明:
currentContext是runLoop的对象——它是作为参数传进executeToolCalls的,主人是runLoop。newMessages(归档用的数组)并没有传给executeToolCalls——它在参数列表之外,执行器无法直接访问。executeToolCalls的职责是”执行”,不是”管状态存到哪几个数组里”。
结论是一条通用原则:谁拥有状态,谁负责写状态。 executeToolCalls 是一个纯粹的执行器,输入 toolCall,输出 result,不修改外部状态。状态(currentContext、newMessages)始终由 runLoop 管理。
这不只是代码整洁问题。正因为执行器不碰外部状态,它才能安全并行执行;否则多个工具并行时会同时写同一个数组,产生竞态。执行器”无法直接写外部状态”是有意的保护。
那个被放回去的 result 是什么类型?沿着类型定义看:它被 push 进 toolResults,而 toolResults 声明为 ToolResultMessage[]。所以结果就是 ToolResultMessage(定义在 ai 包的 types.ts):
1
2
3
4
5
6
7
interface ToolResultMessage {
role: "toolResult"; // 它是一条消息,跟 user/assistant 平级
toolCallId: string; // 对应哪个 toolCall(配对用的钥匙)
toolName: string; // 哪个工具产的
content: (TextContent | ImageContent)[]; // 给模型读的内容
isError: boolean; // 工具成功还是失败
}
toolCallId 的作用是配对:模型生成 toolCall 时给一个 id,结果回来时带同一个 id,模型才能知道”这条结果回应的是哪个请求”。
一批工具:默认并行,有 sequential 工具就整批排队
模型可能一次生成多个 toolCall(比如同时 read 三个文件)。executeToolCalls 怎么调度?看它的开头:
1
2
3
4
5
6
7
const hasSequentialToolCall = toolCalls.some(
(tc) => currentContext.tools?.find((t) => t.name === tc.name)?.executionMode === "sequential",
);
if (config.toolExecution === "sequential" || hasSequentialToolCall) {
return executeToolCallsSequential(...); // 排队
}
return executeToolCallsParallel(...); // 并行
读出来的策略是:
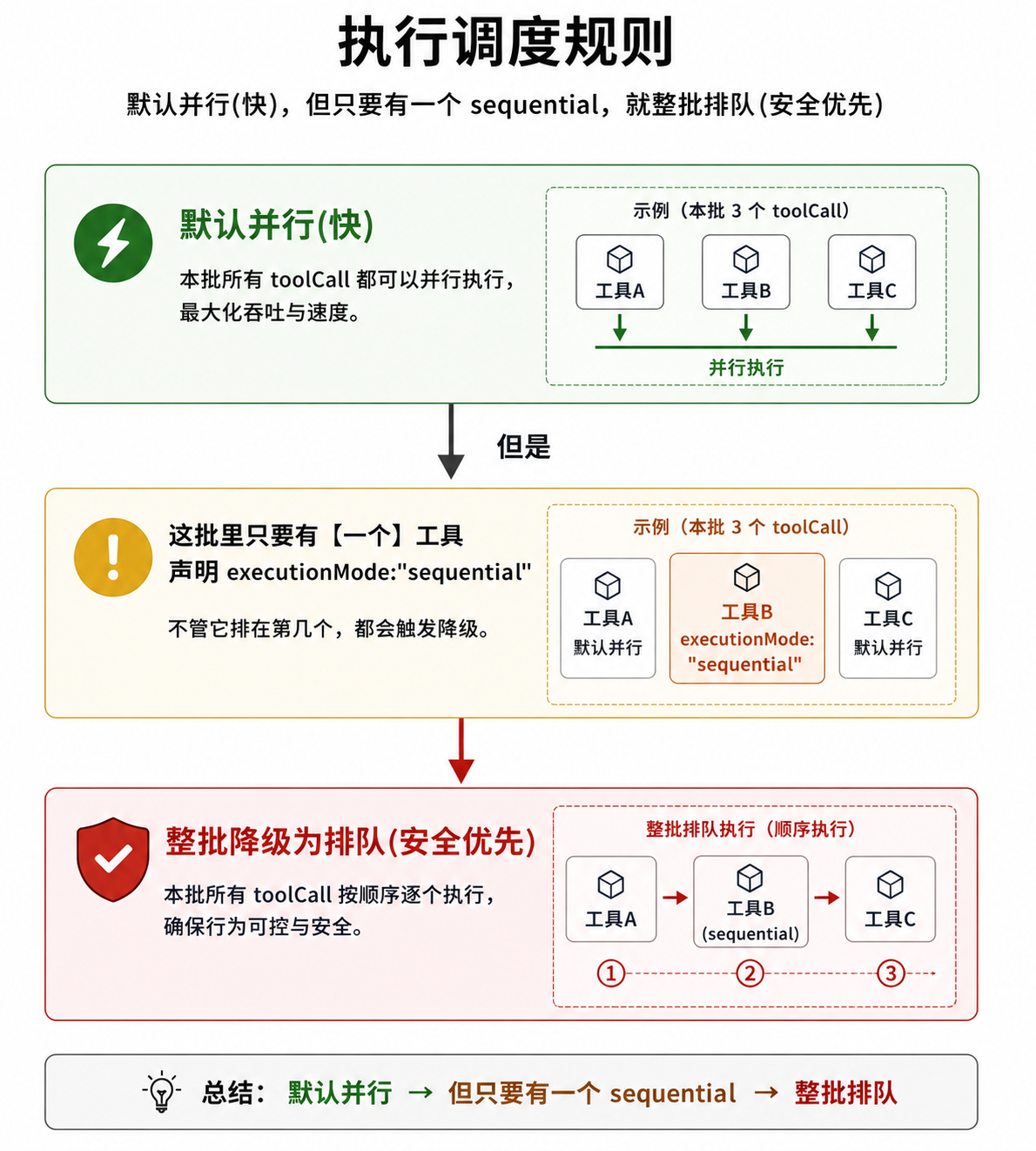
注意是 .some()——”只要存在一个”。3 个工具里有 1 个是 sequential,hasSequentialToolCall 就是 true,整批排队。
哪种工具会声明 sequential?通常是有副作用、并行不安全的工具,比如写文件——两个写操作同时跑可能互相覆盖。只读工具(read、grep)并行无所谓,写类工具则需要排队。
为什么是”整批”排队,而不是”只让那个 sequential 工具排队、其他照样并行”?因为并行的本质是”同时进行、顺序不保证”。如果只让 write 排队、read 仍并行,write 执行期间 read 仍可能并发运行,冲突风险还在。要保证 write 安全,通常需要整批都顺序执行。这是有意的设计取舍。
这里还有一个健壮性细节。.find() 按名字找工具:如果模型生成了一个不存在的工具名(幻觉,比如 banana),.find() 返回 undefined,undefined?.executionMode 借助可选链 ?. 会返回 undefined(而不是触发 undefined.executionMode 异常),最终这个 tc 在 .some() 里算 false。
这样,模型的幻觉就不会中断调度逻辑。banana 这类调用具体怎么处理,下面会讲到。
一个 toolCall 的五步:以排队执行为例
进 executeToolCallsSequential。先看结构,它是一个 for 循环,循环体里有五个动作:
1
2
3
4
5
6
7
8
9
10
11
12
for (const toolCall of toolCalls) { // 排队:一个一个来
emit("tool_execution_start") // ① 发出"开始执行"事件(给 UI/日志)
const preparation = await prepareToolCall(...) // ② 准备(四道关卡,见下)
if (preparation.kind === "immediate") { // ③ 准备阶段就出结果了 → 直接用
finalized = ...
} else {
const executed = await executePreparedToolCall(...) // 真正执行
finalized = await finalizeExecutedToolCall(...) // 收尾(跑 afterToolCall hook)
}
emit("tool_execution_end") // ④ 发出"执行完了"事件
const toolResultMessage = createToolResultMessage(finalized) // ⑤ 打包成 ToolResultMessage
}
tool_execution_start / tool_execution_end 这两个事件,02 篇在事件流里见过名字,现在看到它们从哪里发出来了。
prepareToolCall(②)是准备阶段,它内部有四道关卡。这是 tool 系统错误处理最集中的地方。
四道关卡:错误怎么被统一处理
prepareToolCall 按顺序过四关:
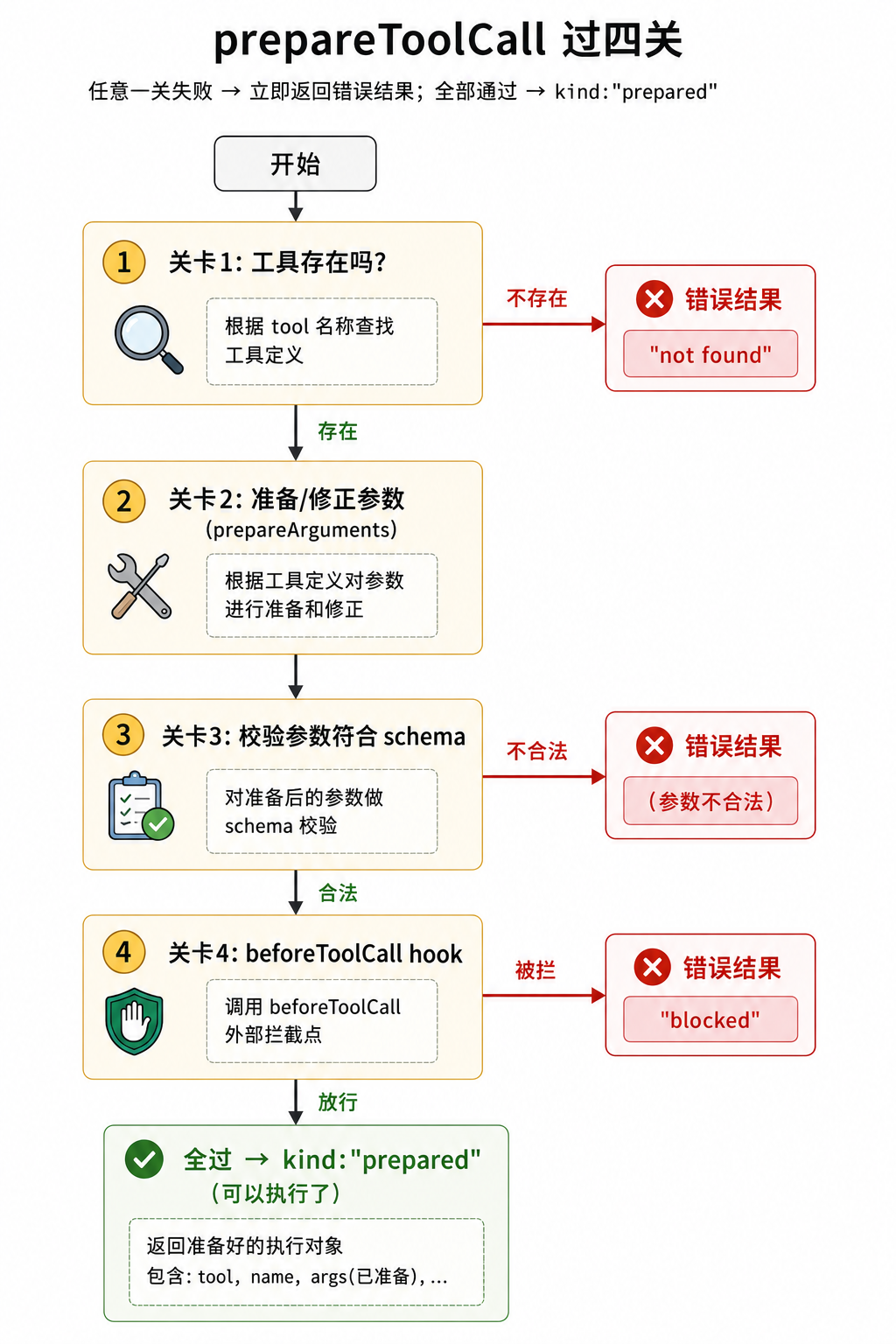
关卡 1:工具不存在(banana 的处理)
1
2
3
4
5
6
7
8
const tool = currentContext.tools?.find((t) => t.name === toolCall.name);
if (!tool) {
return {
kind: "immediate",
result: createErrorToolResult(`Tool ${toolCall.name} not found`),
isError: true,
};
}
banana 会在这里被识别为不存在的工具:Tool banana not found。
注意它返回错误的方式:kind: "immediate" 加 isError: true,没有 throw。也就是把”工具不存在”转换成一条可回传的工具结果。回看上一节执行循环里的第 ③ 步:if (preparation.kind === "immediate") 会直接使用这个结果,不再执行工具。这个错误结果会和正常结果走同一条路径:打包成 ToolResultMessage → 放回上下文 → 下一轮模型读取。
关卡 2-4:修正参数、校验、拦截
1
2
3
4
5
6
7
8
9
10
11
12
13
try {
const preparedToolCall = prepareToolCallArguments(tool, toolCall); // 关卡2: 修正参数
const validatedArgs = validateToolArguments(tool, preparedToolCall); // 关卡3: 校验 schema
if (config.beforeToolCall) { // 关卡4: 执行前的闸
const beforeResult = await config.beforeToolCall({ ...args: validatedArgs... });
if (beforeResult?.block) { // 外部说"拦住"
return { kind: "immediate", result: createErrorToolResult(beforeResult.reason || "..."), isError: true };
}
}
return { kind: "prepared", toolCall, tool, args: validatedArgs }; // 放行
} catch (error) {
return { kind: "immediate", result: createErrorToolResult(error.message), isError: true }; // 校验失败也变成错误结果
}
有个顺序细节值得注意:关卡 4 拿到的是 validatedArgs(已经过关卡 3 校验的参数)。也就是说 beforeToolCall 看到的是”干净、合法”的参数,它不用操心格式对不对,只需要判断这个动作该不该做。校验合法性、判断该不该做,是两件事,拆成两关。
错误的汇流
到这里,关卡 1(工具找不到)、关卡 3(参数不合法)、关卡 4(被拦截)这三条错误路径,最后都调用了同一个 createErrorToolResult。还差一条错误来源,下面补上。
还有第四条:工具执行失败。看 executePreparedToolCall——真正调用工具 execute 的地方:
1
2
3
4
5
6
7
8
9
try {
const result = await prepared.tool.execute(...) // 工具真正执行(可能 throw)
return { result, isError: false }; // 成功
} catch (error) { // 工具 throw 了,被接住
return {
result: createErrorToolResult(error.message), // 异常 → 错误结果
isError: true,
};
}
这里的 createErrorToolResult 和 banana 那条用的是同一个函数。四条错误路最后汇到一个出口:
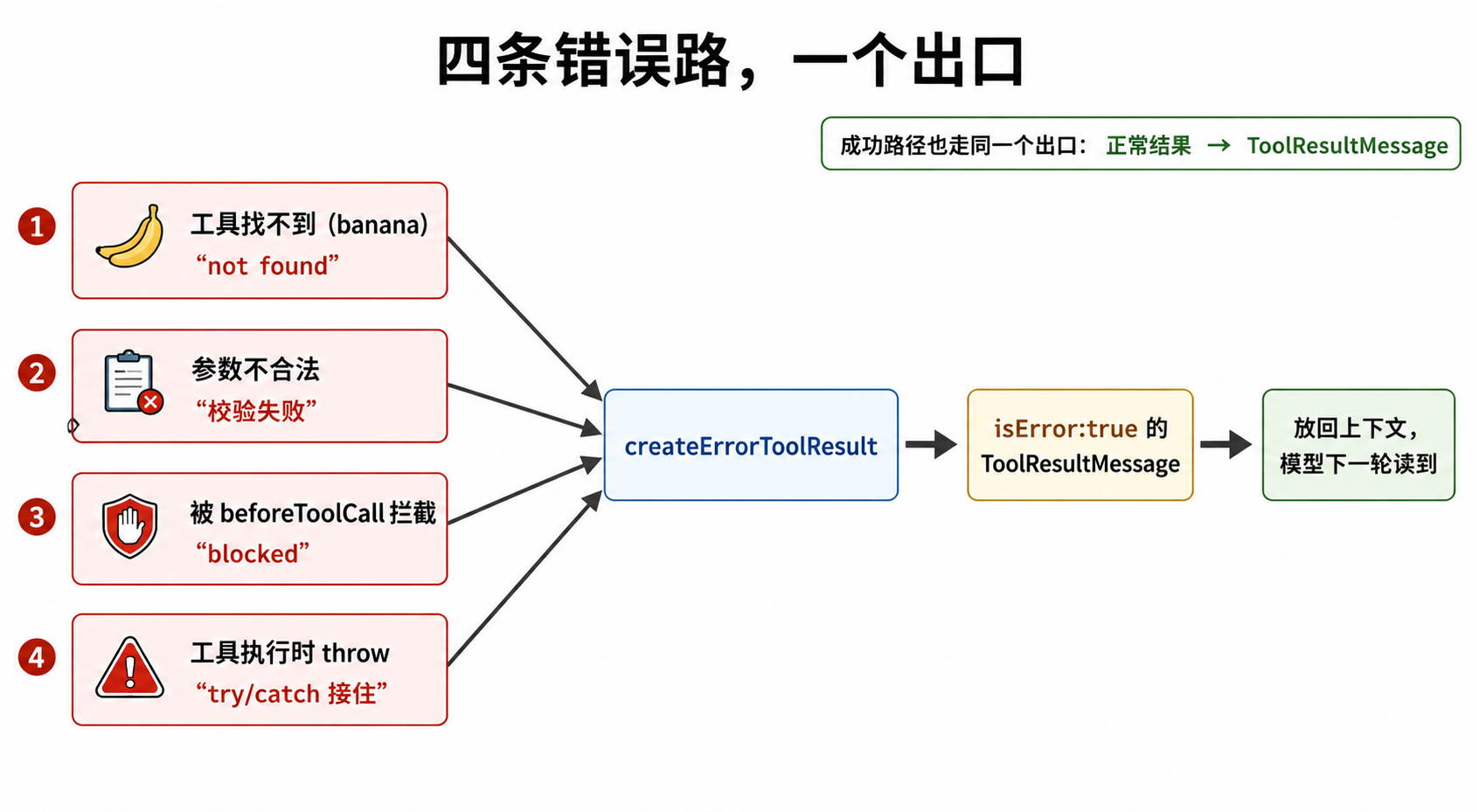
模型不需要区分”是工具不存在还是工具执行失败”,它只需要读到”这次没成功,原因是 XXX”,然后决定下一步。
为什么把错误转成结果:throw 会终止程序,结果可用于反馈
这是整篇的关键。前面所有错误路径有一个共同选择:不 throw,而是把错误变成结果放回去。 为什么?
因为很多错误是模型在决策阶段产生的(比如生成了不存在的 banana)。把错误当结果放回去,模型下一轮读到 Tool banana not found 后,仍有机会修正并继续。
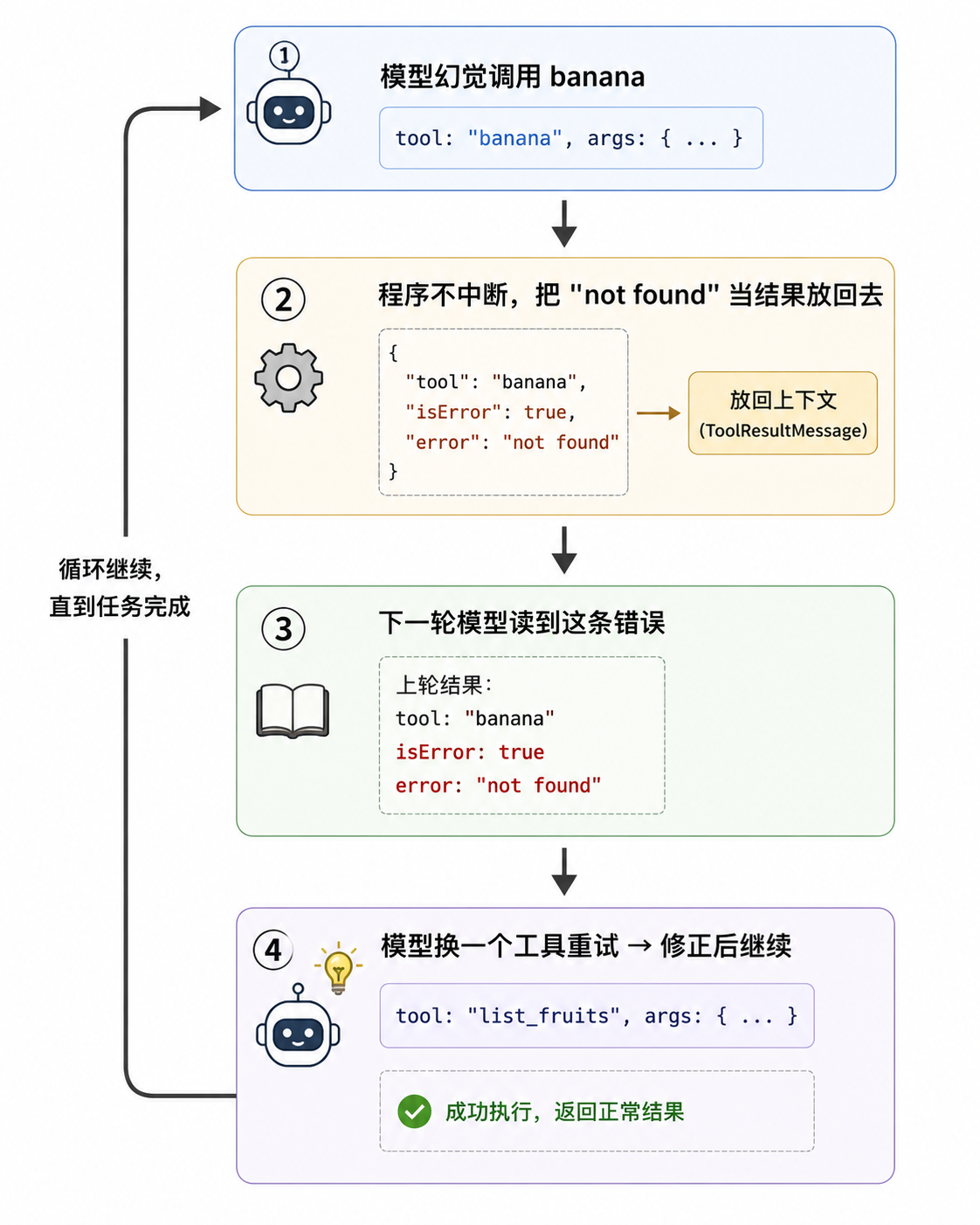
如果改成 throw:程序会直接终止当前流程,模型没有补救机会。一句话:throw 会终止流程,错误结果是给模型的反馈。 Agent 之所以能在较长操作链里继续推进,是因为可恢复错误会被转成反馈放回去,而不是直接中断。
可以归纳一条原则,写自己的 harness 时会反复用到:
凡是模型能补救的错误,都该变成结果放回去,不该
throw。throw只留给模型补救不了的(程序本身的 bug、磁盘满了这类)。
这里有个容易误解、但实际是分层处理的细节。AgentTool.execute 的类型注释写着”Throw on failure instead of encoding errors in content”,即工具内部失败时建议 throw。这和前文并不矛盾,它们对应两个层级:
- 工具作者:执行失败就直接
throw,不用自己包装错误。 - agent loop:在
executePreparedToolCall用 try/catch 接住这个throw,统一转成错误结果。
工具作者负责抛出失败,loop 负责把这些失败统一收敛成”结果”。职责清晰,且避免重复封装。
权限拦截:机制由 loop 给,策略由上层填
最后落到 beforeToolCall(关卡 4)——它是”执行前的最后一道闸”,也是权限确认(”危险命令执行前问一下用户”)的落点。
它有三个特征:
- 可选。开头一句
if (config.beforeToolCall)——没挂这个 hook,整段跳过,默认放行。pi 默认不拦任何工具。 - 被拦的结果和 banana 一样——
kind: "immediate"+createErrorToolResult+isError: true,又是一条错误结果。 - 它只是个拦截点,本身不含任何判断逻辑——它只会问”外部:拦不拦?”,认
block: true/false。判断逻辑在外部挂进来的函数里。
所以,如果要做”危险命令执行前弹窗问用户’确认吗?’“,这段”弹窗 + 等用户回答 + 返回 block”的代码,应该写在外部传进来的 config.beforeToolCall 函数里,而不是 loop 内部、也不是工具的 execute 里。
这是 pi 权限模型的核心:loop 只提供”拦截点”这个机制,”拦不拦、怎么拦(包括问用户)”的策略由上层填。
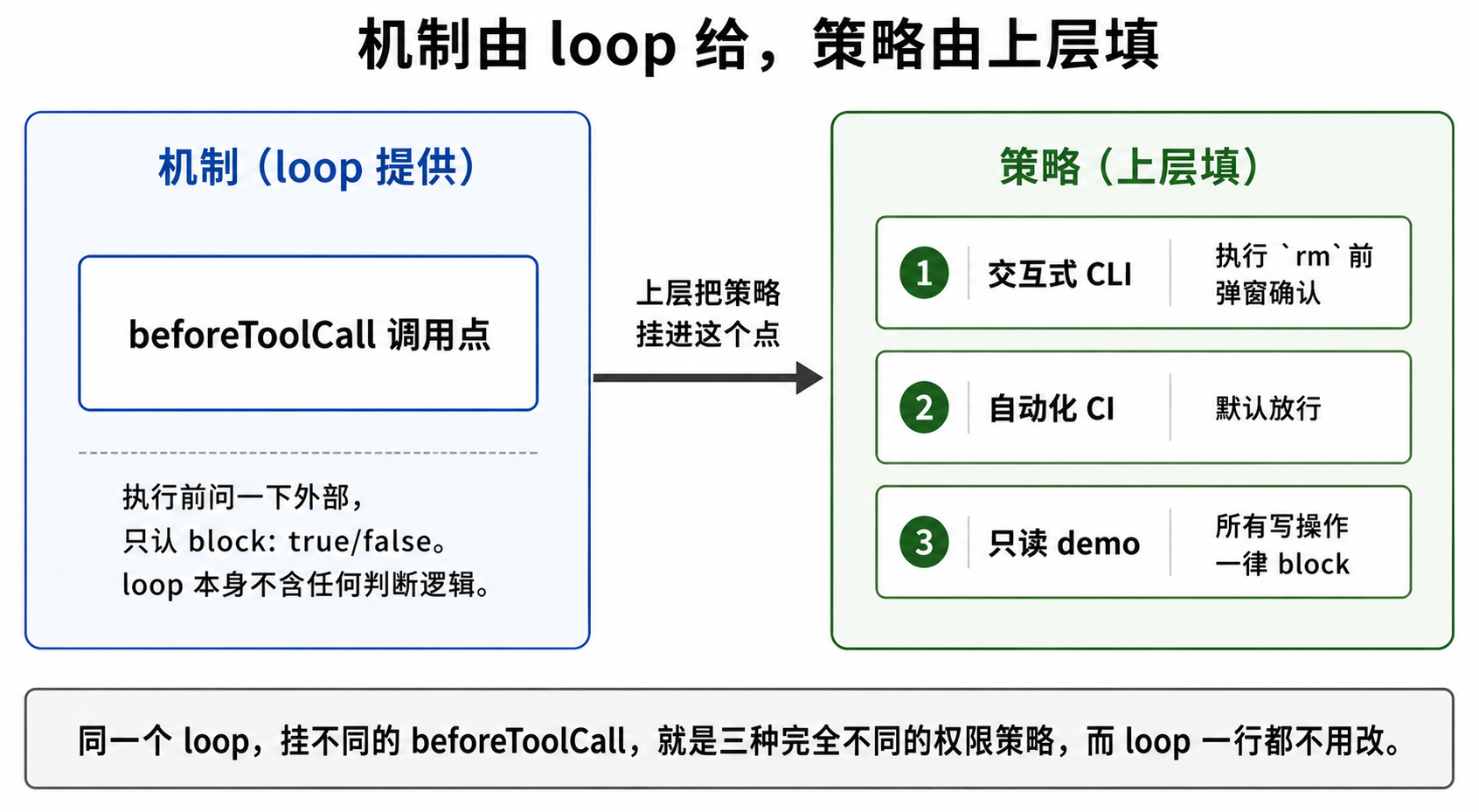
为什么非要这么分?因为”什么算危险”是应用的事,不是 loop 的事:
- 自动化 CI 里的 agent,可能什么都不问(没人在屏幕前点确认)。
- 交互式 CLI,可能每个写操作都问。
- 只读 demo,可能所有写操作直接 block。
同一个 loop,挂不同的 beforeToolCall,就是三种完全不同的权限策略,而 loop 一行都不用改。
这个判断在前几篇也出现过同类模式:beforeToolCall(拦不拦)、03 篇的 streamFn(用哪个 provider)、02 篇的 shouldStopAfterTurn(要不要停),都遵循同一原则:凡是”不同应用会有不同答案”的决定,都不固化在 loop 里,而是做成 hook 交给上层实现。
小结:一个 toolCall 的一生
把这一篇连起来,一个 toolCall 的完整执行链是:
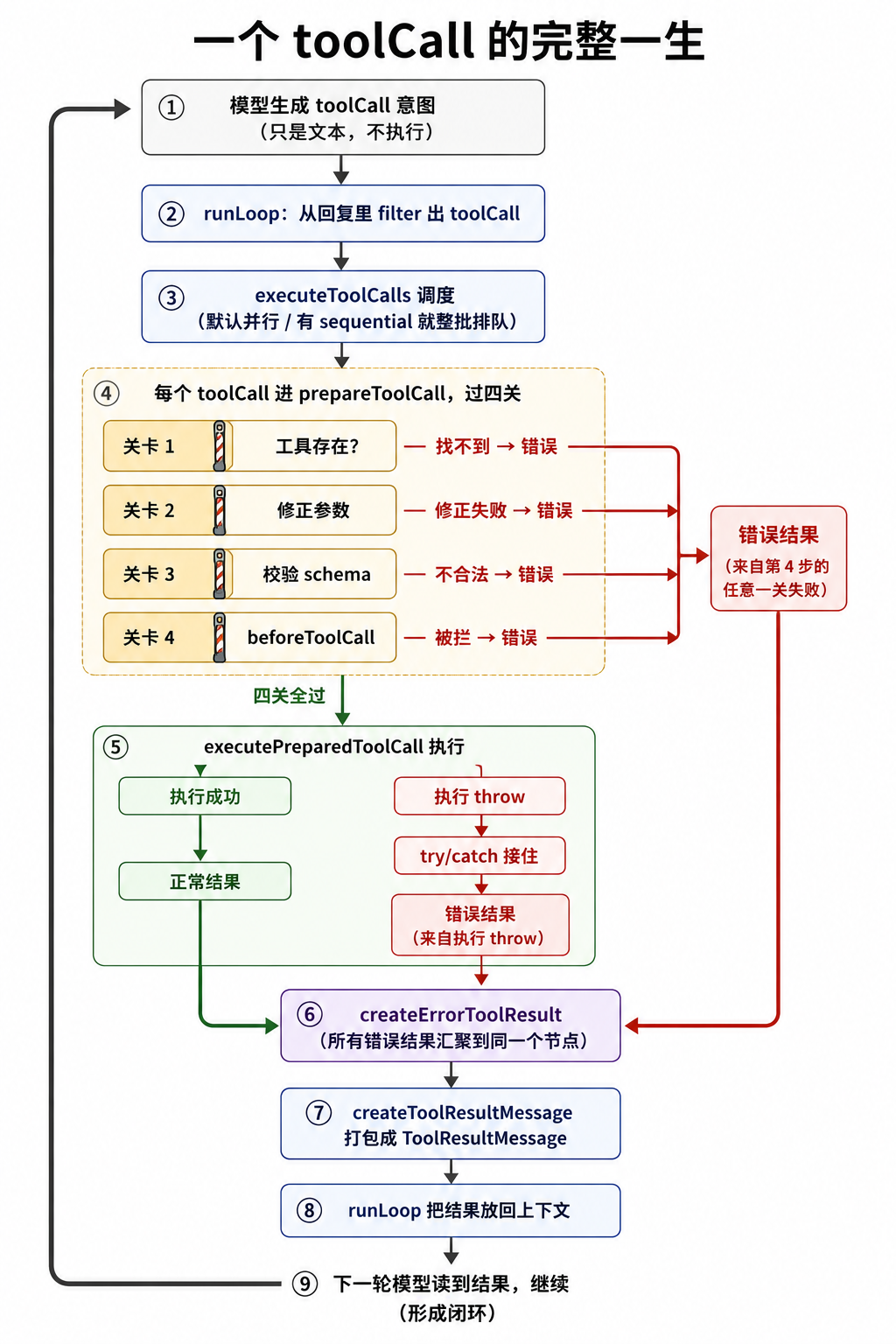
这一篇有两个要点:
- 错误不直接
throw终止,而是转成结果放回模型。这是 agent 可以自我修正并持续推进的基础。四条错误路径汇到同一个出口,模型仍可继续决策。 - 机制和策略分离——loop 提供拦截点(
beforeToolCall),具体拦不拦的策略由上层填。这让同一个 loop 适配只读、交互、自动化等不同的权限场景。